Ziegler Nichols Open Loop Method Inst Tools
It was developed by john g The method involves making a step change to the control variable with the control loop open, then measuring the. It is performed by setting the i (integral) and d (derivative) gains to zero
Ziegler-Nichols Open-Loop Method - Inst Tools
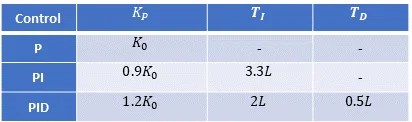
The p (proportional) gain, is then increased (from zero) until it reaches the ultimate gain , at which the output of the control loop has stable and consistent oscillations The first process tuned in simulation was a “generic” process, unspecific in its nature or application And the oscillation period are then used to set the p, i, and d gains depending on the type of controller used and behaviour desired:
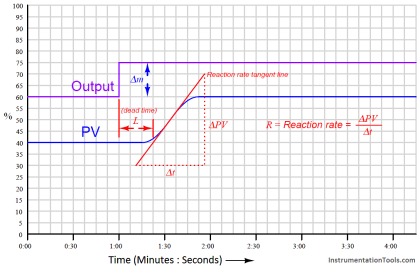
Process gain, dead time, and time constant
These are determined by doing a step test and analyzing the results. The youtube video accompanying this. Worked example with real motor control values While it has limitations, it serves as a useful starting point for achieving acceptable control.
* also implements alternative identification methods The complete system was modeled in matlab/simulink, and the. In contrast to the first tuning technique presented by ziegler and nichols in their landmark 1942 paper where the process was made to oscillate. This may be problematic in.

Ziegler Nichols Method for PID Controller Tuning | PDF

Ziegler Nichols Method for PID Controller Tuning | PDF

ch2b slide65 Ziegler Nichols Open Loop PID tuning Cont'd - YouTube
Ziegler-Nichols Open-Loop Method - Inst Tools

Parameters for Ziegler-Nichols open loop tuning (Astrom and Hagglund

Ziegler-Nichols methods.pptx

Ziegler Nichols Method for PID Controller Tuning | PDF

Ziegler-Nichols methods.pptx
PID tuning methods - Florisera

Lecture 22: Tuning of Industrial controller using Ziegler Nichols open